
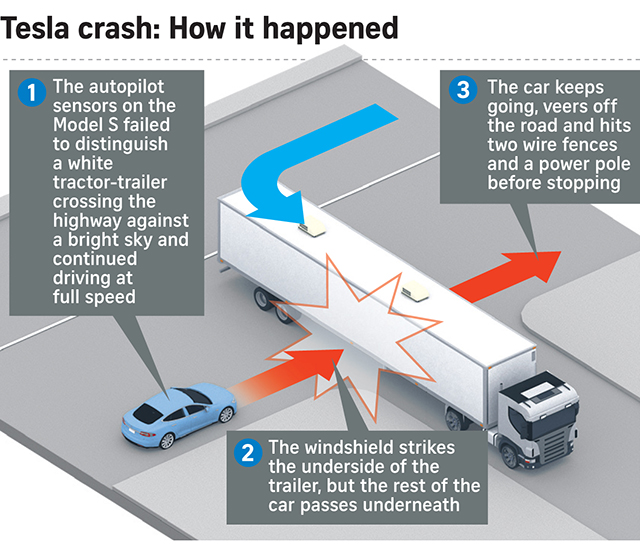
Some days ago the first fatal crash of an autonomous car received the attention of all newspapers and TV news programs. Not only it was the first fatal accident but all preliminary investigations show it was due to autopilot failure.
In this post we would try to clarify our opinion about the way autonomous car leaders are following: our opinion is autonomous driving only is possible in a controlled environment. Highways and roads should be modified to facilitate autonomous car and human drivers and computer drivers cannot drive in the same space.
Let’s check to real cases in order to illustrate this idea.
- High speed trains travel mainly autonomously at more than 200 Km/h. Systems like GSM-R or ERTMS are deployed in railways in order to controlled where all the trains are, if they have the right speed and detecting if one unexpected object falls to the railway.
- Most commercial airplanes have a system for autonomous landing without any pilot intervention. This system is used in strong fog conditions when it is no possible to see the landing strip. It is mandatory supporting systems to be deployed in the airport. Autonomous landing doesn’t work if the airport don’t have these supporting systems.
Even in these cases failures are possible. There were some high-speed train accidents and autonomous landing is only used as a second option when human pilot is not capable at all for landing. What coud we expect from autonomous car in a fully uncontrolled environment like current roads?
Both Google and Tesla protect themselves claiming it is not autonomous driving but a highly assisted driving and human driver should continue paying attention. It is like we lend our car to a not so skill driver and, in a critical situation, you should take the control of the car. This is not realistic. It has to be clear human responsibility and computer responsibility. All tasks done by computer must be 100% secure.
In most cities main highways use to have special lanes where driving is restricted to specific vehicles: two or more people inside, only public transportation, etc. This special lanes use to be reversible as well and direction depends on the time giving more capacity to the direction supporting more traffic. Additionally signalling use to be improved and they are controlled by cameras.

It could be really easy to add autonomous car supporting systems to these special lanes. Even conflicting vehicles could be excluded. Risk would be really minimum and human driver could rest and be fully disconnected of driving. Once security is checked and supporting systems are validated they could be extended to other highways or roads. If environment is replicated security is guaranteed.
Our opinion is autonomous car software valid for all roads or highways will never work. It is impossible a software which considers all possible roads, signalling, human actions, possible dangers, etc. Even really skill drivers have different ways to afford critical situations. Autonomous car valid anyplace is not possible as we don’t have a clear model to replicate, and even we haven’t consider legal manufacturer responsibilities in accidents.





